发布时间:2024-09-30 09:03:11 浏览 次
作者:张帅,姜宗品(通信作者),赵鹏,王超
单位:安图实验仪器(郑州)有限公司 (河南郑州 450016)
〔关键词〕样本托;缓存装置;缓存;换向
〔中图分类号〕TP23 〔文献标识码〕B
〔文章编号〕1002-2376(2024)01-0041-04
体外诊断是指在人体外通过对人体样本(如血液、体液、组织等)进行检测而获取临床诊断的信息产品和服务 [1]。目前,国外体外诊断企业基本具备诊断试剂和设备的生产能力,而国内企业以生产试剂为主,同时具备高端诊断设备研发实力的企业较少 [2-3]。 国内体外诊断相关的实验室自动化系统设备功能相对薄弱,许多设备仍采用手动提供样本托的供给方式。人工供给样本托费时费力、效率低且无缓存。因此,如何提高样本托的供给效率,增加自动化缓存,是目前相关设备生产企业研究的重点 [4]。
1 样本托缓存装置的设计
样本托缓存装置用于实验室自动化流水线中的样本托供给,能够实现样本托的高效供给,减少人工供给费时费力的问题,同时保障样本托的自动化缓存。
1.1 样本托缓存装置的工作原理
样本托缓存装置主要由传送带缓存机构、转向机构和自张紧机构组成 [5-7]。该装置工作时,需设置样本托缓存装置的一端为入口,另一端为出口。由自张紧装置提供皮带动力,相邻皮带传输方向相反,轨道采用同轴设计原理,水平方向 1 个自张紧装置可带动 2 条皮带同时运行 [8-9]。垂直方向为单独 1 个自张紧装置,其中样本托缓存装置传送带缓存装置至少为 2 个,且平行设置,由自张紧装置提供皮带动力,相邻传送带缓存装置的传送方向相反。转向装置用于自动传输样本托。如图 1 所示,样本托依次通过入口进入样本托缓存装置,通过传送带缓存装置输送样本托,当样本托运行至传送带缓存装置的末端时,通过导向片转向进入下 1 个传送带缓存装置。此时样本托在运行至轨道末端时,需通过转向装置运行至下 1 个传送带缓存装置并进行输送,直至样本托到达样本托缓存装置的出口缓存。

注:101 为自张紧机构 1,102 为传送带缓存机构,103 为出口,104 为转向机构,105 为导向片,106 为入口, 107 为样本托,108 为自张紧机构 3,109 为导向片,110 为自张紧机构 2,111 为导向片
图 1 样本托缓存装置
1.2 硬件材料与结构设计
1.2.1 传送带缓存机构
传送带缓存机构组件主要为型材机加件,材质选用型号为 A6061 的铝合金。导向片为 2.0 钣金件,材质选用型号为 A6061 的铝合金。同步带为聚氨酯材料。装配使用的固定连接件优先选用型号为SUS304 的不锈钢材质。
如图 2 所示,传送带缓存机构主要由传送带 1、第一导轨、传输带 2、第二导轨、导向片 1、导向片 2、传送带 3、第三导轨、导向片 3、传送带 4、第四导轨、传送带 5、第五导轨组成。第一、二、三、四导轨作为支撑组件水平并排安装,导轨两端需安装同步轮及轴承组装,用于连接传送带,第五导轨两端安装同步轮与连接传送带 5 后,整体与水平传送组件进行拼接。导向片 1、2、3 用于固定各零件,使其紧密贴合安装,另可用于样本托的换向传送,传送带 5 为垂直运行,传送带 1、2、3、4 为水平运行。传送带 1 与传送带 3 运行方向一致,传送带 2 与传送带 4 运行方向一致。
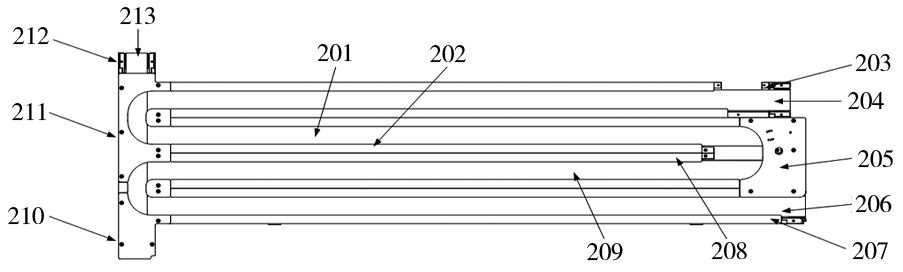
注:201 为传送带 3,202 为第三导轨,203 为第四导轨,204 为传送带 4,205 为导向片 2,206 为传送带 1,207 为第一导轨,208 为第二导轨,209 为传送带 2,210 为导向片 1,211 为导向片 3,212 为第五导轨,213 为传送带 5
图 2 传送带缓存机构
1.2.2 转向机构
如图 3 所示,转向机构主要由转向轴、聚氨酯同步轮、转向固定板、同步轮 1、同步轮 2、同步带、电机固定板、电机、电机张紧板组成。其标准件为:聚氨酯同步轮、同步带、同步轮 1、同步轮 2 和电机。定制件中的机加件:转向轴材质为 SUS304 不锈钢。钣金件:转向固定板材质为 SUS304 不锈钢。转向机构中的转向固定板支撑整个机构,电机作为动力装置带动同步轮 2、同步带、同步轮 1 运行,同时带动转向轴转动。
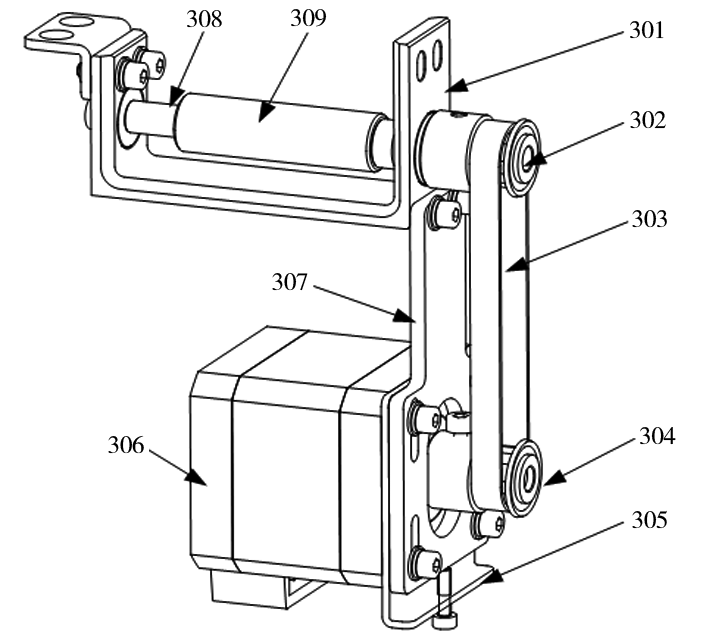
注:301 为转向固定板,302 为同步轮 1,303 为同步带,304 为同步轮 2,305 为电机张紧板,306 为电机,307 为电机固定板,308 为转向轴,309 为聚氨酯同步轮
图 3 转向机构
1.2.3 自张紧机构
如图 4 所示,自张紧机构由电机、张紧调整板、安装板、惰轮安装板、皮带、主动轮、从动轮、弹簧、滑轨安装板、滑轨和惰轮组成。其中,标准件为:电机、皮带、主动轮、从动轮、弹簧、滑轨和惰轮。定制件中的机加件(安装板、惰轮安装板和滑轨安装板)材质为 A6063 铝合金。钣金件(张紧调整板)材质为 SUS304 不锈钢板。自张紧机构的安装板支撑整个机构,电机作为动力装置带动主动轮,通过皮带带动从动带轮运行,运行时通过弹簧调整自身的自张紧。自张紧装置采用集成化和模块化设计,便于安装和兼容多种规格导轨,如图 5 所示。
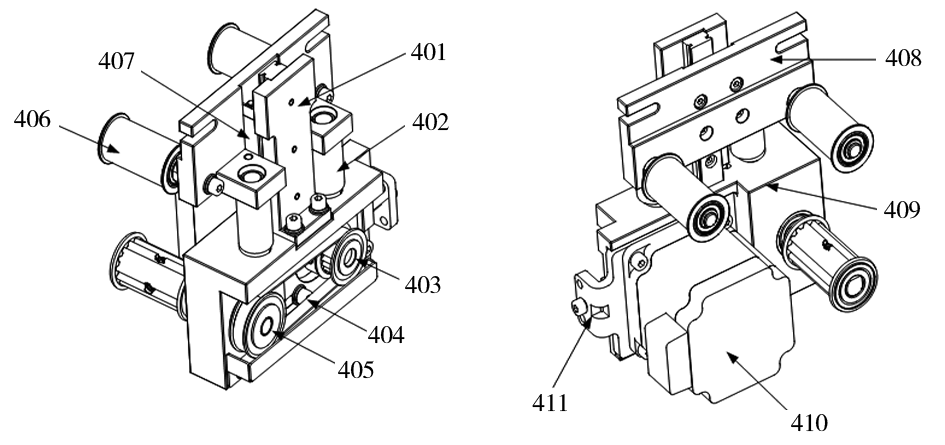
注:401 为滑轨安装板,402 为弹簧,403 为主动带轮,404 为皮带,405 为从动带轮,406 为惰轮,407 为滑轨,408 为惰轮安装板,409 为安装板,410 为电机,411 为张紧调整板
图 4 自张紧机构
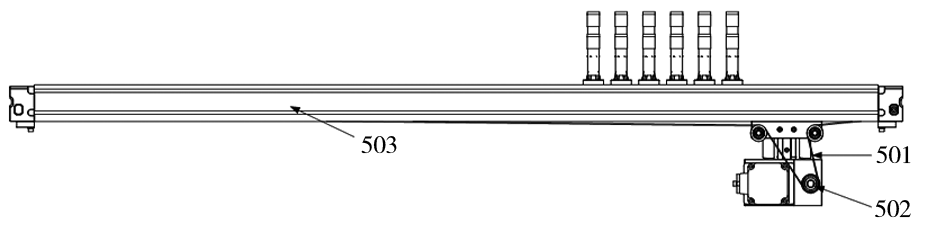
注:501 为同步带,502 为自张紧机构,503 为轨道
图 5 自张紧机构应用场景
1.3 软件逻辑设计
样本托缓存装置的软件逻辑工作流程,如图 6所示。样本试管在进入主轨道后,通过射频识别装置读取样本托底部的相关样本数据,通过上位机判断是否需要进行离心操作。若需进行离心,样本会自动进入离心机,样本托随后通过轨道传输到样本托缓存装置区域,利用同步带及转向装置依次传输进入轨道内,样本完成离心后试管被放入样本托,最后样本托进入出样轨道。 其中,样本托的缓存装置可缓存 100 个样本托,同时实现缓存过程中样本托不滞留、不卡顿的要求。
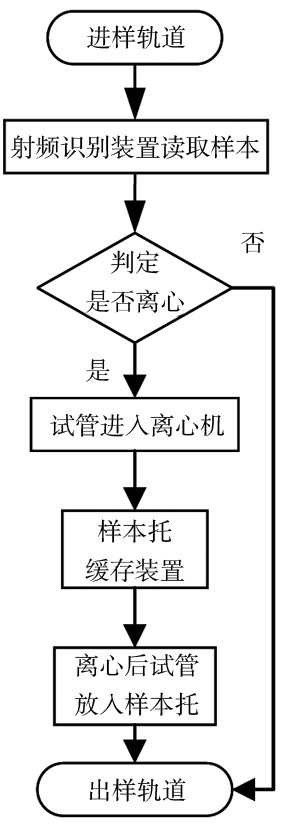
图 6 软件逻辑设计工作流程
2 样本托缓存装置运动力学分析
样本托缓存装置在样本托传输过程中存在疲劳问题及故障率较多的现象,因此对驱动装置的要求相对较高。现以驱动装置为例,进行运动力学分析,即主要通过转动惯量和转矩的计算确定相关驱动装置电机的参数。
2.3.1 转动惯量
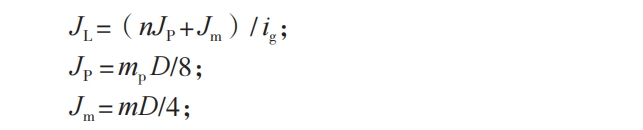
式中,JL 为总负载惯量(kg·m2 );JP 为带轮 /滚筒惯量(kg·m2 );Jm 为负载惯量(kg·m2 );n 为带轮 / 滚筒个数(个);ig 为减速比;m 为负载重量(kg);mp 为带轮 / 滚筒质量(kg);D 为带轮 /滚筒直径(mm);
1 个样本托质量为 60 g,1 条轨道可运行 25 个样本托,4 条轨道共可运行 100 个样本托(质量共计为 600 g),又因 1 个电机可带动 2 条轨道同时运行,样本托共为 50 个,可计算负载重量 m= 3 kg。结合已知参数:D=20 mm、mp= 0.02 kg、n = 2、ig=1.25,可计算出 JL = 1.93 kg·m2 。
2.3.2 电机参数的选择及校核
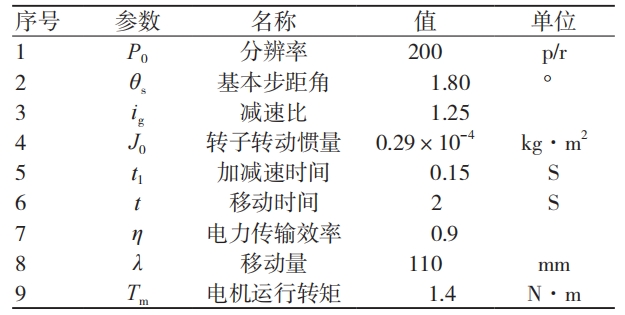
根据转动惯量及设计需求,选择电机参数见表 1,并校核惯性比及安全系数。
惯量比的公式为:

结合上述 JL 及 i 和转子转动惯量 J0,可求出β = 0.66,惯量比 < 10 为合格,满足要求。
安全系数的公式为:
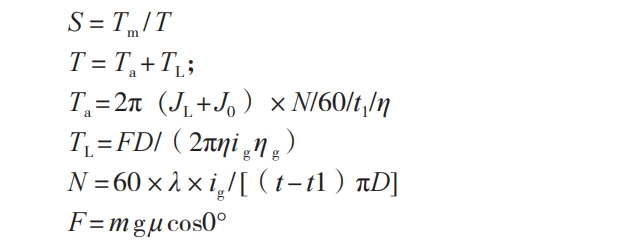
式中,T 为转矩(N·m);Ta 为加速转矩(N·m);TL 为负载转矩(N·m);N 为电机转速(r/min);t1 为加速时间(s);t 为移动时间(s);ηg 为效率;ig为减速比;η 为带轮 / 滚筒效率;μ 为滑动面摩擦系数;λ 为移动量(m);F 为摩擦推力(N);
结合上述已知参数:带轮 / 滚筒效率 η =0.9、ig=1.25、ηg= 0.9、μ = 0.2、t1 = 0.15 s、t =1 s、移动量 λ =110 mm,以及 Tm = 1.4 N·m,从而得出运行安全系数 S = 16.299,满足使用要求(S ≥ 2)。
表 1 电机参数选择
3 样本托缓存装置的应用
样本托缓存装置配套应用于医用实验室离心模块,作为离心模块的重要组成部分。目前样本托的供应多采用传统方式(手动或半自动提供样本托),样本托供给不足,工作效率较低,无样本托缓存。与本设计装置对比见表 2。
表 2 传统方式与本设计装置对比
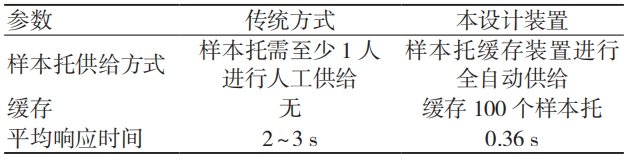
本研究设计的样本托缓存装置创新点如下:(1)可缓存。该装置增加 100 个样本托缓存区,能够保障样本托及时有效地进入缓存区等待;在满足通量的情况下,当样本管完成离心后,样本托可以尽快到达指定位置,样本管无需等待。 (2)成本低。该装置能够全自动供给样本托,减少了传统供给方式的时间成本、人工成本和管理成本。(3)效率高。该装置单个样本托响应时间为0.36 s,传统方式响应时间为 2 ~ 3 s,其效率提高82% ~ 88 %,等效 624 万次疲劳寿命,可节省净时间 118 ~ 190 d。
经应用测试及并线疲劳测试结果显示,样本托可通过传输顺利到达样本托缓存装置,并实现与模块间的并机配合,等效 10 年疲劳,624 万次测试量,测试结果未出现问题,满足疲劳测试要求(图 7)。
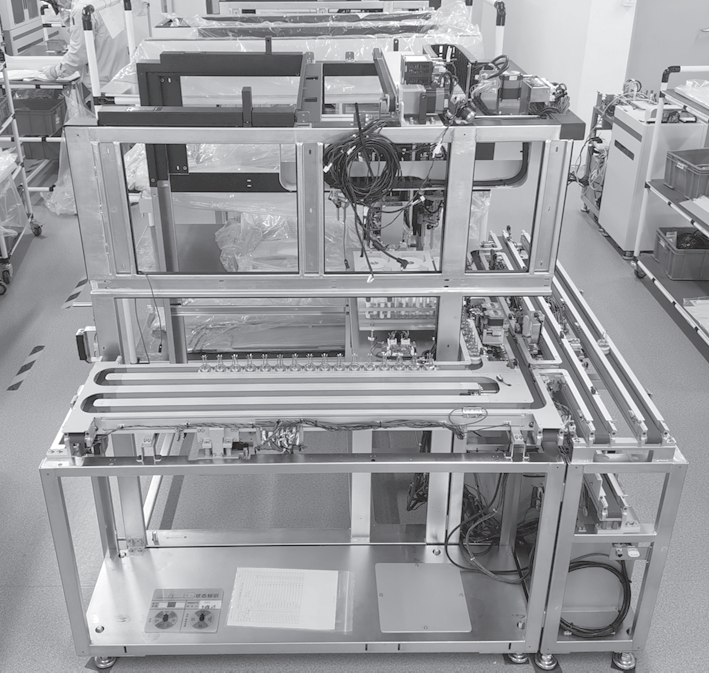
图 7 并机疲劳测试
4 总结
本研究设计的样本托缓存装置分别对传送带的缓存机构、转向机构和自张紧机构 3 部分进行硬件材料与结构设计,并结合软件逻辑设计分析,构建出整体结构和布局。同时进行运动力学分析,完成电机的选型与校核,为其提供理论基础。经应用和疲劳测试,进一步验证该装置设计的可靠性。结果表明,该装置作为体外诊断样本托供给的初始环节,能够替代传统的人工或半自动化供给方式,实现稳定、高效和大容量的缓存,为样本托的供给和缓存场景提供了有利的参考。
【参考文献】
[1]徐芳萍, 黄慧媛, 褚淑贞 . 我国体外诊断试剂产业发展现状、问题及对策 [J]. 中国医药工业杂志,2019,50(11):1367-1373.
[2]付亚文, 杜玉珍, 高锋 . CLSI 临床实验室自动化标准概述 [J]. 检验医学,2020, 35(4):370-373.
[3]高倩, 江洪, 陈禹保 . 我国体外诊断行业发展现状与对策建议 [J]. 中国生物工程杂志,2022, 42(10):105-111.
[4]袁晓燕, 国东, 耿建利, 等 . AutolumiS 3000 全自动微粒子化学发光检测仪样本管理系统的设计与应用 [J].中国医学工程,2019,27(12):1-4.
[5]濮良贵 . 机械设计 [M]. 北京:高等教育出版社,2019.
[6]孙桓, 陈作模, 葛文杰 . 机械原理 [M]. 北京:高等教育出版社, 2013.
[7]闻邦椿 . 机械设计手册 [M]. 北京:机械工业出版社出版,2010.
[8]黄捷建, 王军, 肖哲之 . 步进电动机在装备制造业中的应用经验 [J]. 微特电机,2012,40(5):29-33.
[9]吴志, 宁萌, 颜大千, 等. 机械手设计及其运动分析 [J].机械设计与研究,2022, 38 (2):97-119.
内容来源于《医疗装备》杂志,如需转载请注明出处。

欢迎关注《医疗装备》官方公众号

