发布时间:2024-01-19 09:10:22 浏览 次
作者:王月英,李挥,吴少帅,杜胜利(通信作者)
单位:河北省药品医疗器械检验研究院 (河北石家庄 050000)
〔关键词〕外骨骼康复机器人;机械危害;电磁兼容性;辐射发射
〔中图分类号〕R197.39 〔文献标识码〕C
〔文章编号〕1002-2376(2023)24-0042-04
基金项目:河北省重点研发计划项目(223777117D)
外骨骼康复机器人的研制融合了传感技术、控制技术、信息技术、机械技术等多种技术,并采用了交互控制、拟人化步姿及高精度电机控制算法等,是可帮助患者重新站立、行走,提高患者行动能力的可穿戴式医疗设备,因此,又被称作可穿戴机器人。
外骨骼康复机器人在行动障碍康复群体中应用较广泛,可帮助患者进行更有效的康复运动,辅助恢复行走能力,使患者可重新站立、行走,从而提高生活质量;同时还可坚定患者康复治疗的决心,提高其自信心。此外,外骨骼康复机器人在临床实践中还可帮助医护人员更有效地开展康复治疗工作。外骨骼康复机器人能够提供精确的运动支持和力量反馈,医护人员可更好地控制患者的运动幅度和力度,实现精准治疗 [1-3]。
外骨骼康复机器人使用过程中存在如下机械方面的危害:外骨骼康复机器人行动过程中,关节部位的相对运动可能造成一定的挤压剪切形成俘获区域,严重危及操作人员的人身安全。外骨骼康复机器人还存在如下电磁辐射方面的危害:外骨骼康复机器人电机发射的电磁辐射过高,可导致其控制系统中精密器件的性能下降,还可对周围电子设备的正常运行造成干扰。由于患者通过穿戴的方式使用外骨骼康复机器人,若电磁辐射过高或发生突变,可能对身体健康造成潜在威胁。
针对以上问题,本研究依据新版 9706 系列标准,分析影响外骨骼机器人安全性的关键技术,并提出相关改进措施,为康复器械类产品的检验检测及生产环节提供参考,提高产品质量。
1 GB 9706.1-2020 通用标准中机械危害的要求
新版医用电气设备通用标准 GB 9706.1-2020《医用电气设备 第 1 部分:基本安全和基本性能的通用要求》[4] 替代了旧版标准 GB 9706.1-2007《医用电气设备 第 1 部分:安全通用要求》[5],已于 2023 年 5 月1 日实施,新版标准提到的机械危害 [4] 见表 1。
表 1 GB 9706.1-2020 提及的机械危害
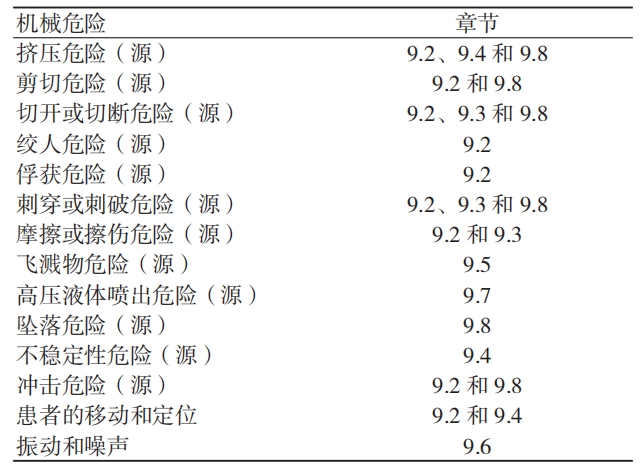
GB 9706.1-2020 标准引入了“俘获区域”这个新术语,其定义为:在 ME 设备或 ME 系统上或内部,或在设备环境中,人的身体或人的身体部分能够暴露于俘获、压制、剪切、冲击、切割、缠绕、卷入、刺穿或摩擦的危险(源)可触及区域 [4]。
由于外骨骼康复机器人包含复杂的机械结构和运动部件,如关节、连杆、齿轮等,这些运动部件在机器人工作时可能产生挤压、剪切或切开等危险,造成俘获区域。若外骨骼康复机器人的设计或制造存在如部件松动、锐利边缘或尖角等缺陷,可能导致机械危害,且该危害可能在使用过程中出现并对患者或操作人员造成伤害。此外,外骨骼康复机器人可能缺乏必要的安全防护措施,如防护罩、安全开关等。若设计生产环节未对以上安全措施予以充分考虑和实现,则可增加危险发生的可能性。若使用人员在使用过程中违反操作规程、操作不当,也可导致机械危害的发生。
外骨骼康复机器人的关节部位易形成对手掌和手指的俘获区域间隙,因此新版 9706.1 标准中要求俘获区域间隙应满足表 2 的要求 [4]。
表 2 可接受的间隙
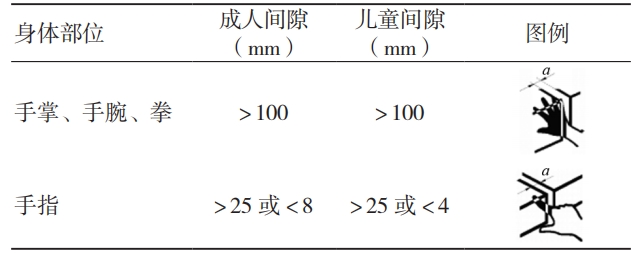
对外骨骼康复机器人俘获区域间隙安全性进行测试时,应考虑机器人的多个运动部位,图 1 ~ 3 分别为大腿与小腿之间的区域、小腿与脚部之间的区域、大腿与腰部之间的区域,同时也应考虑适用人群是否为儿童。在图 1、图 2 中,腿部之间及腿部与脚部之间的俘获区域间隙对手掌、手腕、拳 3 个身体部位会产生风险,因此,其间隙应 >100 mm;而在图 3 中,大腿与腰部的小缝隙对手指会产生机械危害的风险,因此,大腿与腰部的缝隙应 >25 mm,即使人的手指进去也不会产生挤压风险,或缝隙应 <8 mm / 4 mm(成人 / 儿童),使手指无法进入。制造商应标记防夹手标识并在随附文件中解释说明,同时应安装急停开关(图 4),在紧急情况下能够使机器人迅速停止运行,以确保患者和操作人员的安全。

图 1 大腿与小腿之间的区域

图 2 小腿与脚部之间的区域

图 3 大腿与腰部之间的区域
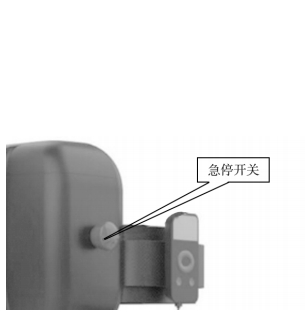
图 4 急停开关
2 YY 9706.102-2021 并列标准中电磁兼容性的要求
YY 9706.102-2021《医用电气设备 第 1-2 部分:基本安全和基本性能的通用要求并列标准:电磁兼容要求和试验》[6] 替代了 YY 0505-2012《医用电气设备第 1-2 部分:安全通用要求并列标准:电磁兼容 要求和试验》[7],规定了医用电气设备的电磁兼容性要求和试验方法,包括电磁发射和电磁抗扰度。电磁发射的具体要求:医用电气设备应具有一定的电磁发射控制能力,以避免对其他设备产生过大的干扰。相关测试项目包括辐射发射、传导发射、谐波失真、电压波动闪烁。电磁抗扰度的具体要求:医用电气设备应具有一定的抗干扰能力,能够在一定的电磁环境中正常工作。相关测试项目包括静电放电、电快速瞬变脉冲群、浪涌、射频电磁场辐射、传导抗扰度、工频磁场、电压跌落中断 [8]。
外骨骼康复机器人存在的电磁兼容风险主要有以下 2 个方面。(1)电磁干扰:外骨骼康复机器人使用电机、传感器等电子设备,这些设备在运行过程中可能产生电磁干扰。若电磁干扰过强,可能干扰外骨骼机器人的控制系统,使其无法正常工作或出现误操作,也可能影响周围电子设备的正常运行。例如,若外骨骼机器人与附近的收音机、心电监测仪、起搏器、手机、蓝牙、WIFI 通信等设备处于同一电磁环境中,可能对这些设备产生干扰,影响其正常运行。(2)电磁抗扰度:外骨骼康复机器人使用高精度传感器感知人体的运动和姿态,若存在静电干扰,可能影响传感器的正常工作。静电积累到一定程度还可能导致设备内部电路损坏。外骨骼康复机器人若未采取有效的防雷措施,可能成为雷电袭击的目标,雷电的瞬间电流和电压可能对设备的电路和电机等部件造成严重损坏。
2.1 辐射发射要求
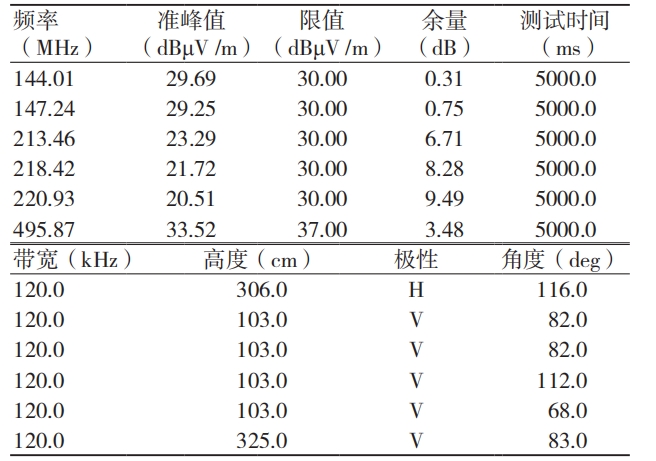
针对外骨骼康复机器人存在的电磁兼容风险,按照 YY 9706.102-2021 及 GB 4824-2019《工业、科学和医疗设备射频骚扰特性限值和测量方法》[9]标准进行测试。外骨骼康复机器人除在医院使用外,在家庭等其他场所也会使用,因此,分组分类为 1 组 B 类,进行电磁兼容辐射发射测试时会遇到超标的问题。图 5 为某企业送检的外骨骼康复机器人的辐射发射测试结果,表 3 为试验数据。其 中 在 229.499 MHz( 高) 频 段 时, 测 试 结 果 为30.82 dBµV/m,超出标准限值 0.82 dBµV/m。针对此超标现象,从电机设计和驱动电路两方面进行原因分析:(1)无刷电机所使用的材料可能存在导电性能不佳、磁导率不合适等问题,导致高频谐波难以有效抑制;(2)无刷电机的驱动电路设计中可能存在高频谐波的产生条件,如不合适的开关频率、滤波电路设计不当。对此,可采取措施优化电机设计,如选择更合适的磁导材料,增加电磁屏蔽材料以降低电磁辐射;还可在驱动电路中加入合适的滤波器,以减少高频谐波的产生。整改后再测试,测试结果见图 6,高频段的发射量有所下降,试验数据见表 4,未超过标准限值线,最终满足标准要求。
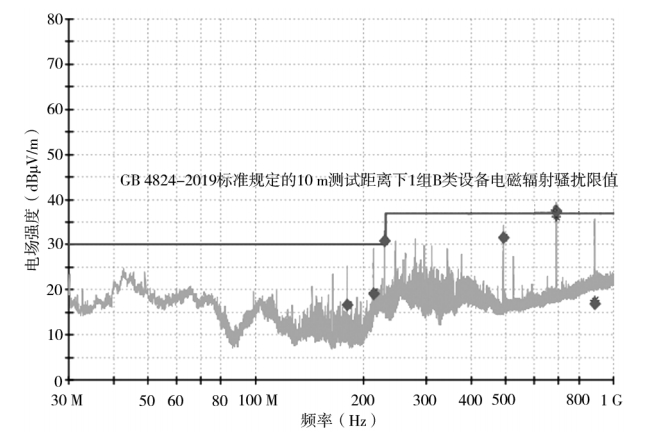
图 5 改进前辐射发射测试结果
表 3 改进前辐射发射测试结果数据表
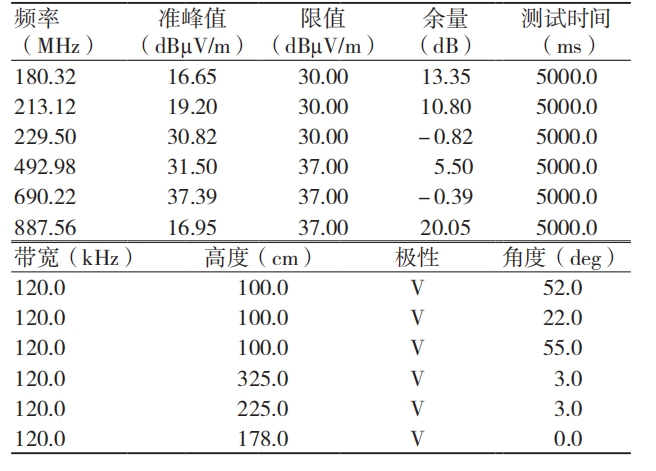
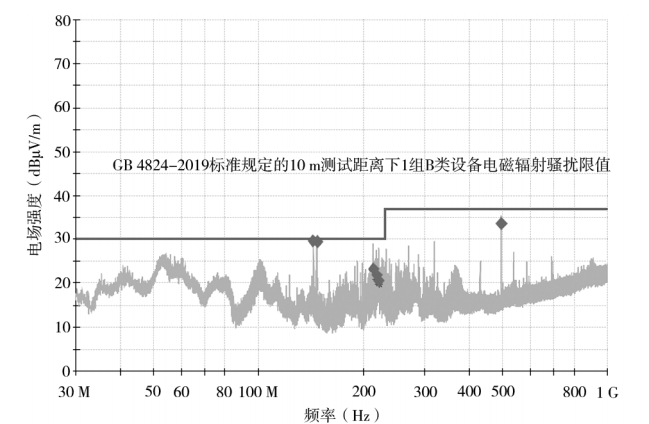
图 6 改进后辐射发射测试结果
表 4 改进后辐射发射测试数据表
2.2 电磁兼容抗扰度基本性能的识别和工作模式的确定
新版9706系列标准中新增加了基本性能要求。基本性能定义为:与基本安全不相关的临床功能的性能,其丧失或降低到低于制造商规定的限值会导致不可接受的风险 [4]。GB 9706.1-2020 标准中未具体规定产品的基本性能,但某些产品专用标准详细规定了基本性能。目前尚无对外骨骼康复机器人基本性能的明确规定,因此,制造商需根据产品具体情况进行风险分析,确认外骨骼康复机器人的基本性能。被测设备的基本性能能否保持是电磁兼容抗扰度试验是否合格的依据。对于外骨骼康复机器人而言,可将其行走速度的误差作为电磁兼容抗扰度基本性能,即外骨骼康复机器人进行电磁兼容抗扰度项目测试期间,若行走速度超出制造商声称的误差,则电磁抗扰度测试无法通过;若行走速度在测试期间一直保持在制造商声称的误差内,则电磁抗扰度测试通过。
对被测设备进行电磁兼容测试时工作模式的选取,应从产品基本组成、供电模式、临床功能、辅助设备、可持续状态、基本性能等方面综合考虑 [10-11]。外骨骼康复机器人包含正常工作和充电 2 种模式。正常工作模式需考虑以下情形:由于外骨骼康复机器人需通过穿戴方式使用,所以还应考虑使用人的体质量,在实验时应加入载荷;在测试时,被测设备应处于最大功耗工作状态下,即将外骨骼康复机器人的步行速度设置为最大并以最快速度持续行走;因测试时外骨骼康复机器人处于行走状态,所以测试时需将被测设备安装于固定工装上,以保障其在测试期间不发生倾倒。
3 小结
本研究以新版 9706 系列标准为依据,分别对外骨骼康复机器人的机械危害中的俘获区域进行安全性评价、电磁危害中的辐射发射超标案例进行分析及安全性评价,提出改进措施,并阐述了外骨骼康复机器人在进行电磁兼容测试时的基本性能和工作模式。通过以上分析,以期为外骨骼康复器械类产品的检验检测工作和生产环节提供参考,保障患者使用安全,防止使用过程中可能出现的风险和意外伤害,同时助力康复医疗器械产品质量的提高,满足人们对高效、安全的康复治疗的需求。
【参考文献】
[1]李龙飞,朱凌云,荀向锋 . 可穿戴下肢外骨骼康复机器人研究现状与发展趋势 [J]. 医疗卫生装备,2019,40(12):89-97.
[2]李薇,郑鹏远,丁婵婵,等.下肢外骨骼康复机器人的研究现状和发展趋势 [J].中国设备工程,2023(15):257-259.
[3]刘瑞平,欧阳钧 .下肢外骨骼康复机器人的发展和应用 [J]. 中山大学学报(医学科学版),2023,44(2):354-360.
[4]国家市场监督管理总局,国家标准化管理委员会 . 医用电气设备 第1部分:基本安全和基本性能的通用要求:GB 9706.1-2020[S]. 北京:中国标准出版社,2020.
[5]国家质量监督检验检疫总局,国家标准化管理委员会 . 医用电气设备 第1部分:安全通用要求:GB 9706.1-2007[S]. 北京:中国标准出版社,2007.
[6]国家药品监督管理局 . 医用电气设备 第1-2 部分:基本安全和基本性能的通用要求 并列标准:电磁兼容要求和试验:YY 9706.102-2021[S]. 北京:中国标准出版社,2021.
[7]国家食品药品监督管理局 . 医用电气设备 第1-2 部分:安全通用要求 并列标准:电磁兼容 要求和试验:YY 0505-2012[S]. 北京:中国标准出版社,2012.
[8]焦红 . YY 0505-2012 医用电气设备 第1-2部分:安全通用要求 并列标准:电磁兼容要求和试验 标准解读 [M]. 北京:中国标准出版社,2013 :35.
[9]国家市场监督管理总局,国家标准化管理委员会 . 工业、科学和医疗设备 射频骚扰特性限值和测量方法:GB 4824-2019[S]. 北京:中国标准出版社,2019.
[10]李佳戈,苏宗文,任海萍 . 医疗器械电磁兼容试验中工作模式的确定 [J]. 中国医疗设备,2019,34(9):17-19,23.
[11]张锐钊,刘懿,刘智伟 . 新版 9706系列标准基本性能要求及电磁兼容抗扰度试验分析 [J]. 中国医疗器械信息,2023,29(19)36-38,42.
内容来源于《医疗装备》杂志,如需转载请注明出处。

欢迎关注《医疗装备》官方公众号

