发布时间:2018-06-15 10:52:18 浏览 次
作者:闫旭1,向华 1,2
单位:1 北京市医疗器械检验所;2 医疗器械检验与安全性评价北京市重点实验室
〔关键词〕机器人;颅颌面;定位精度;检测
〔中图分类号〕TP242.3 〔文献标识码〕B
〔文章编号〕1002-2376(2018)03-0028-04
近年来,随着机器人技术日新月异地发展,其在医疗领域的应用越来越广,其中以 Da Vinci 机器人辅助微创手术系统最为著名,其通过内镜系统完成数据采集,具有 6 个自由度的手术器械末端可以任意模仿医师的动作,进行精细化手术操作。
国内近年也在大力发展手术机器人的研发工作,哈尔滨工业大学、北京理工大学、北京航空航天大学、天津大学等研究机构分别在脑外科、神经外科、整形外科领域等研究方向上开展工作,有些手术机器人产品已经取得了医疗器械注册证,在临床领域获得了令人满意的成果,如天智航公司与北京积水潭医院合作开发的骨科手术机器人定位系统。
为落实《 国家中长期科学和技术发展规划纲要(2006—2020年)》和《中国制造2025》等规划,国家重点研发计划启动实施“智能机器人”重点专项,科技部发布了国家重点研发计划智能机器人等重点专项2017年度项目申报指南的通知。
其中4·11项“颅底及面侧深区穿刺诊疗机器人示范应用”与本研究进行试验的对象异曲同工。其中涉及的研究内容包括:研制颅底及面侧深区穿刺诊疗机器人产品,实现活检、放射性粒子植入、射频消融等穿刺类手术。申报指南中涉及的考核指标:机器人导航定位精度优于2mm;机器人自由度不少于5个,能够完成颅底及面侧深区肿瘤活检、多点放射性粒子植入、射频消融3种穿刺手术;建立颅底及面侧深区穿刺诊疗机器人的医疗器械检测标准与方法。
本研究的目的为对颅颌面穿刺诊疗机器人的关键技术指标定位精度建立检测方案,并进行实际验证。
1 颅颌面穿刺诊疗机器人的研发背景及预期用途
颅颌面外科手术或涉及颅脑、重要血管神经等“致命”解剖结构,因而存在较大难度及风险。
具体表现为:颅颌面深区解剖结构复杂,视野狭窄,手术实施困难,为了保证视野,常规手术切口大,创伤重;对于解剖结构复杂和血管神经集中的区域,易损伤重要的颅内血管神经,手术风险高,术后并发症较多。随着现代外科技术的发展,微创治疗逐步在颅颌面外科应用,颅底及面侧深区穿刺类手术是其中的典型代表。通过穿刺操作,可以获得深部肿瘤组织,进行病理诊断;可以在恶性肿瘤内及周边组织植入放射性粒子;也可以穿刺达到三叉神经节,对于病变部位进行射频消融,以治疗三叉神经痛。临床研究表明,穿刺手术避免了传统的切开手术,减轻了患者痛苦,降低了手术风险,扩大了适应证,受到广大医师和患者的欢迎,具有很好的临床应用前景[1]。
但由于该解剖部位隐蔽深在,重要结构多,穿刺类手术仍存在较高风险,常规依靠医师经验穿刺不但容易损伤这些结构,导致出血、颅神经损伤等危及生命的并发症,而且还不能准确进入瘤体,致使无法获得肿瘤组织,延误早期诊断。
以计算机图形、图像技术、先进制造技术、智能控制及操作为核心技术的手术辅助机器人系统为这一难题提供了解决方案。机器人辅助手术技术体系能够在术前基于患者 CT数据进行三维虚拟手术方案规划;术中通过导航系统实现实际患者与虚拟患者的实时匹配,引导手术操作;由机械臂完成关键操作步骤;通过遥控操作技术实现异地手术操作等[2]。
2 颅颌面穿刺诊疗机器人系统定位精度的试验方案
目前国内外并无针对手术机器人医疗器械产品的标准,北京市医疗器械检验所与北京大学口腔医院合作,结合颅颌面穿刺诊疗机器人的工作原理确定机器人产品的技术指标,研究制定相应的检测方法;对于机器人产品的电气安全性、电磁兼容性进行评估测试以及机器人产品的软件算法准确性进行评估。
最终目标是结合以上各个因素形成一套完整的颅颌面穿刺诊疗机器人检测方案。目前手术机器人类别的医疗器械没有国家及行业标准,甚至没有国际性的标准用以参考。
因此在确定其性能指标时,一方面参照以往检测此类产品时与本产品类似的项目;另一方面,参考了颅颌面穿刺诊疗机器人产品科研项目立项书上涉及的性能指标。其中定位精度是手术机器人系统最核心的性能指标[3],其直接影响着外科手术的成功与否,并且颅颌面穿刺诊疗机器人系统的各个子部件均会对机器人系统的定位精度产生影响。
由此,本研究首先对颅颌面穿刺诊疗机器人系统的各个子部件制订了定位精度检测方案,进行了模块化的验证,接下来验证机器人系统整体的定位精度。具体分别从以下几方面:
(1)机器人系统导航精度:用于验证导航仪对于机器人组件的定位精度;(2)机器人系统把持精度:用于验证机器人系统的可拆卸、更换部件在手术中反复安装时的位置精度;
(3)机器人控制定位精度:用于验证机器人系统完成手术流程时的总体定位精度。
本研究进行了数次试验来确定每个检测项目的具体试验步骤,目的是确保试验方法的客观性、可重复性以及稳定性。为此加工了一些测试工装,最终确定了检测方案。从结果分析的角度,本研究对于试验数据的平均误差与标准偏差进行了计算,从平均误差与被试设备的定位精度设计值相比较,以此判断试验方法是否可行;从标准偏差与平均误差间的差异来判断系统的定位稳定性[4]。
2.1 机器人导航精度
按颅颌面穿刺诊疗机器人可控制的组件分为手柄的导航精度和末端定位支架的导航定位精度。
2.1.1 测试准备
本项试验需要用到以下的设备和试验工装:
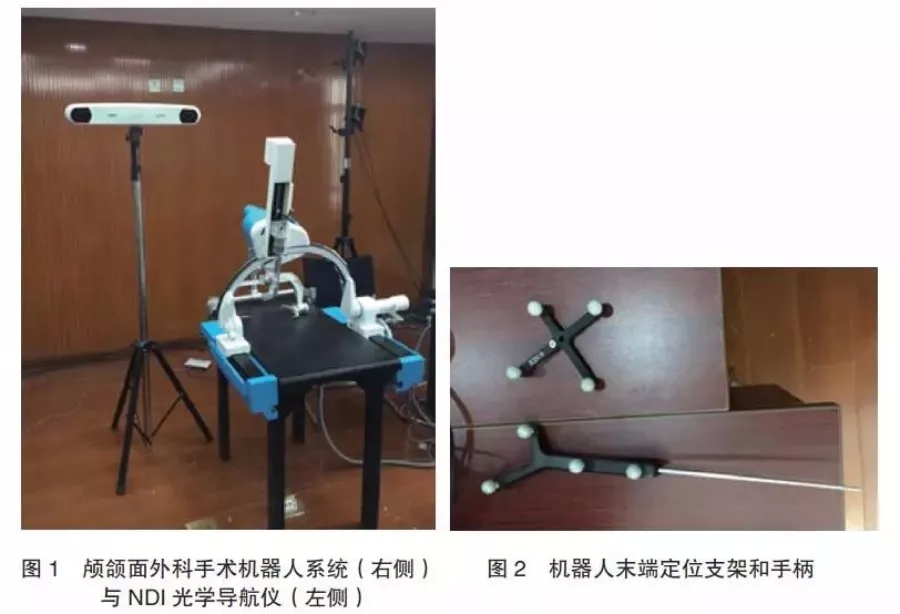
(1 )颅颌面穿刺诊疗机器人系统,见图 1;
(2 )光学导航仪,见图 1;
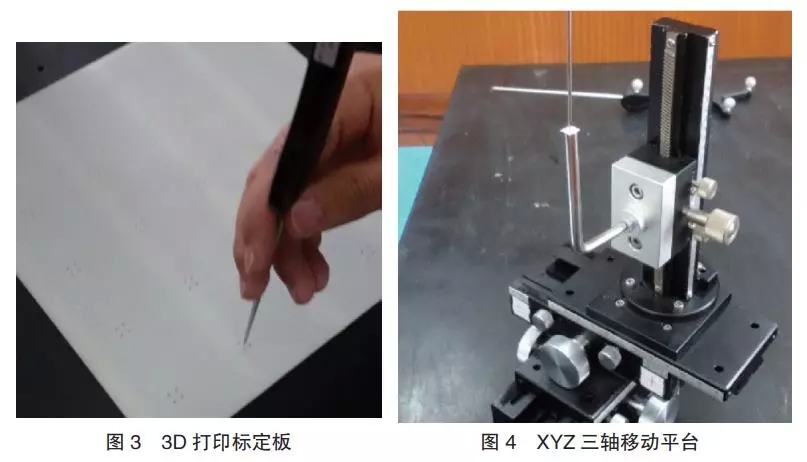
(3 )定位手柄,见图 2;
(4 )机器人末端定位支架,见图2;
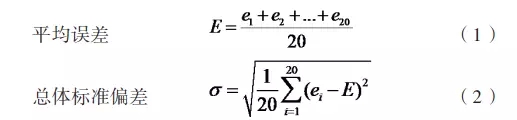
(5)标定板:具有5 mm间距的横纵刻度,尺寸250 mm×250 mm,3D 打印制成,见图 3 ;
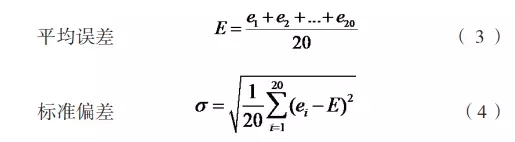
(6 )XYZ 三轴移动平台(各轴游标卡尺位置精度 0.1 mm),见图 4。
2.1.2 手柄的导航精度试验步骤
(1 )将标定板置于机器人下方的可达空间内,方向任意,角度任意,只要保证指针最终处于导航仪的视野范围内即可;
(2 )标定板的中心点设为原点(0,0 ),然后任意选择两个坐标点,记录坐标值,分别设为点 1:O1(Xo1,Yo1 )和点 2:O2(Xo2,Yo2 );
(3 )将指针垂直于标定板指向点 1,记录导航仪软件上该点的空间坐标 T1(Xt1,Yt1,Zt1 );
(4 )将指针垂直于标定板指向点 2,记录导航仪软件上该点的空间坐标 T2(Xt2,Yt2,Zt2 );
(5 )分别计算和 ,以标定板为真实值,计算导航计算结果的误差的绝对值 e ;
(6 )将标定板更换位置,重复步骤(2~6 ),共进行 20 组测试;
(7 )按照式(1 )、式(2 )计算平均误差(E)和标准偏差(σ),作为精度结果。
2.1.3 末端定位支架的导航精度试验步骤
(1)调节固定在桌上的 XYZ 三轴平台,使得平台上的标志点对准针尖所在位置,记录此时的平台读数为 A(Xa,Ya,Za),记录此时导航仪软件上该点的空间坐标 Ta(Xta,Yta,Zta);
(2 )将平台调节至不妨碍机器人运动的位置;
(3 )通过机器人控制系统控制机器人最后一个自由度移动一段特定距离;
(4 )调节 XYZ 三轴平台,使得标志点仍然对准针尖所在位置,记录此时的平台读数为 B(Xb,Yb,Zb),记录此时导航仪软件上该点的空间坐标 Tb(Xtb,Ytb,Ztb);
(5)计算点 A 与点 B 之间的欧几里得距离,记为 d ;计算点 Ta 与点 Tb 之间的欧几里得距离,记为 dT,则 |d-dT| 即为机器人系统的导航误差绝对值 e ;
(6 )变换机器人位姿,使测试范围尽可能覆盖机器人的运动空间,重复步骤(1~6),共20次;
(7)按照式(3)、式(4)计算平均误差(E)和标准偏差(σ),作为精度结果。
2.2 颅颌面穿刺诊疗机器人把持精度
2.2.1 测试准备
本项试验需要用到以下的设备和试验工装:
(1 )颅颌面穿刺诊疗机器人系统;
(2 )XYZ 三轴移动平台(各轴游标卡尺位置精度 0.1 mm);
(3 )三种手术末端 [(三叉神经热凝消融末端(图 5 ),穿刺活检末端(图 6 )和放射性粒子植入末端(图 7 )] 及其对应的穿刺针。


2.2.2 把持精度试验步骤
(1 )选取三叉神经热凝消融末端手术末端;
(2 )将穿刺末端固定在机器人的末端快速接口上;
(3 )调节固定在桌上的 XYZ 三轴平台,使得平台上的标志点对准针尖所在位置,记录此时的平台读数 A(Xa,Ya,Za);
(4 )将平台调节到不妨碍拆卸末端的位置,将末端卸下;
(5 )次将末端安装至机器人的末端快速接口上;
(6 )重新调节 XYZ 平台,使得标志点对准针尖所在位置,记录此时的平台读数B(Xb,Yb,Zb);
(7 )两次平台读数计算的欧几里得空间距离 |A-B|,即为快速接口的重复定位误差绝对值 e;
(8)重复步骤(1~6 )10 次,按照式(5 )、式(6 )获得误差的平均值(E)与标准偏差(σ),作为精度结果:
(9 )分别更换为穿刺活检末端和放射性粒子植入末端(配合对应的穿刺针),重复步骤(2~8 ),各完成 10 组测试,并计算获得每种手术末端的平均误差和总体标准偏差,作为本项测试的结果。
2.3 颅颌面穿刺诊疗机器人控制定位精度
2.3.1 测试准备
(1 )颅颌面穿刺诊疗机器人系统;
(2 )光学导航仪;
(3 )XYZ 三轴移动平台(各轴游标卡尺位置精度 0.1 mm);
(4 )标定板;
(5 )导航仪定位手柄。
2.3.2 控制定位精度测试步骤
(1 )使用光学导航仪在该区域靠近中间位置完成机器人的空间注册。测试内容为针尖点在空间中的三维定位精度,因此测试过程中穿刺针方向与注册时保持一致,注册时使穿刺针垂直指向三轴平台上的标记点;
(2 )将 XYZ 三轴平台固定在机器人下方的工作空间内;
(3 )设定 XYZ三轴平台的一个位于所测试区域中的空间点 A(Xa,Ya,Za)为目标点,用导航仪的手柄垂直指向该点并设定为机器人的目标点,然后将 XYZ 平台调至不影响机器人运动的位置;
(4 )使机器人在导航仪下自动移动到目标位置;
(5 )调节 XYZ 三轴平台使标志点对准机器人的末端,记录此时的平台读数为 B(Xb,Yb,Zb);
(6 )计算点 A 与点 B 之间的欧几里得空间距离 |A-B|,即为机器人在导航仪下的控制定位误差绝对值 e ;
(7 )在该区域内重复步骤(3~6 )共计 20 次,按照式(7 )、式(8 )计算获得定位误差的平均值(E)与标准偏差(σ),作为精度结果:

3 对于颅颌面穿刺诊疗机器人定位精度的试验结果
3.1 颅颌面穿刺诊疗机器人导航精度试验结果
试验结果见图 8。
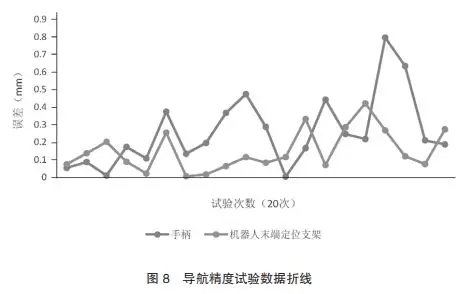
平均误差与标准偏差的计算结果见表 1。
3.2 颅颌面穿刺诊疗机器人把持精度试验结果
试验结果见图 9。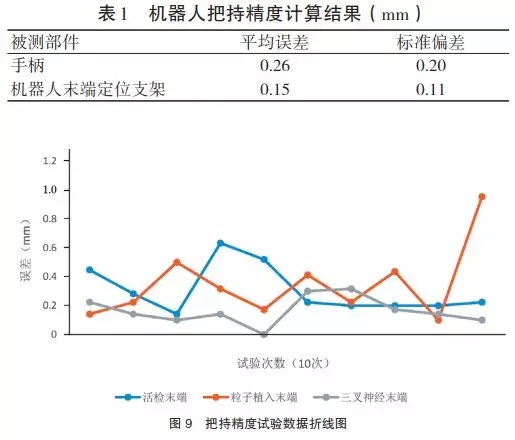
平均误差与标准偏差的计算结果见表 2。

3.3 颅颌面穿刺诊疗机器人控制定位精度试验结果
试验结果见图 10。
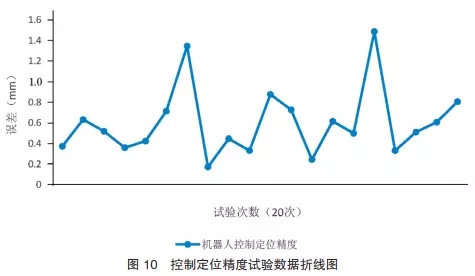
平均误差与标准偏差的计算结果:平均误差(mm)为0.60 ;标准偏差(mm)为 0.33。
3.4 试验结果分析
需要指出的是,光学导航仪对于手术机器人的定位受到标记点摆放位置的影响 [5],因此在试验过程中应时刻注意标记点的位置是否处于光学导航仪的有效观察范围内,减少光学导航仪测量误差对于最终试验结果的影响。
通过上述试验可以看出,机器人导航精度的平均误差与标准偏差均在 0.5 mm 之内;机器人把持精度的平均误差与标准偏差均在 0.5 mm 之内;机器人控制定位精度的平均误差与标准偏差均在 1 mm 之内。这些数值是与颅颌面穿刺诊疗机器人的设计目标值相一致的,说明本研究设计的检测方案具备了一定的可靠性与准确性。
4 结论
本研究从颅颌面穿刺诊疗机器人系统的应用背景入手,结合目前手术机器人类别产品没有国家标准、行业标准要求的现状,针对其关键性能指标—定位精度,提出了详细的检验方案,并以此在实验室进行了试验,得到了较为稳定的试验结果,证明本研究制定的检验方案是切实可行的。
以上是对颅颌面穿刺诊疗机器人系统性能评估的第一阶段,随着合作方对于产品的升级改进,接下来还将继续优化测试方案,并且进一步提高测试工装的精度。本研究过程通过对手术机器人类别医疗器械产品检测方法的研究,积累了相关检测经验,对于建立起明确、有效的手术机器人检测方案是一个良好开端。
[参考文献]
[1]朱建华,郭传瑸 . 手术机器人系统在颅颌面外科中的应用及发展 [J]. 华西口腔医学杂志,2016,34(5):534-538.
[2]段星光,郭传瑸,陈超 . 颅颌面外科辅助手术机器人系统 [J].机器人技术与应用,2011(4):38-42.
[3]刘军传,张玉茹,李振 . 神经外科机器人定位精度研究 [J]. 机器人,2007,29(2):123-127.
[4]苏永刚,张维军,王豫 . 骶骼关节螺钉手术导航机器人系统设计及实验研究 [J]. 北京生物医学工程,2013,32(4):331-335.
[5]郭兆君,丁辉,王广志,等 . 手术导航中定位跟踪系统精度问题的研究 [J]. 北京生物医学工程,2008,27(2):146-150.

欢迎关注《医疗装备》官方公众号

